



(北京22日综合电)中国载人航天办公室周五披露,中国太空站成功完成了太空站管道检测机械人在轨试验,验证管道检测机械人的管道环境适应能力和“变刚度运动”的安全性,为未来配合太空站完成管道检测提供技术基础。
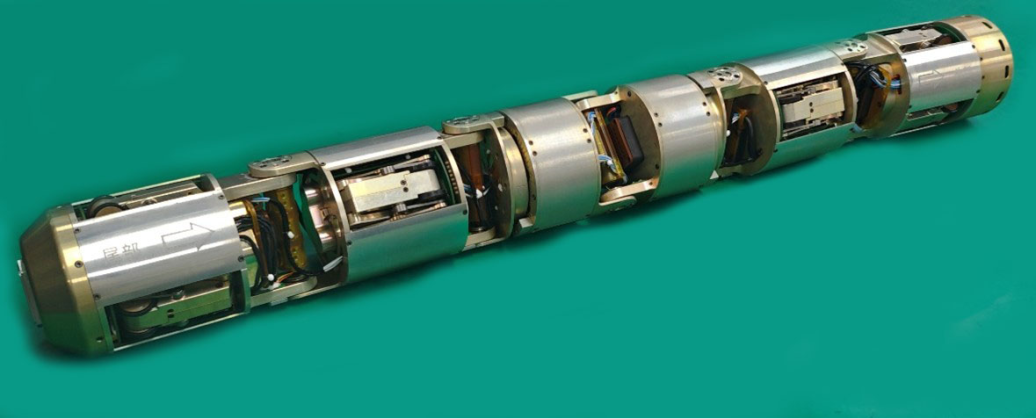
该款管道机械人借鉴了棘皮动物(如海星、海胆、海参等)的管足器官“静止时收缩于体内,运动时向外延伸”的运动机理,以“自主伸张、受力收缩、无电变柔”的仿生变刚度设计思路,设计了主、被动结合的腿部剪叉伸缩机构。
ADVERTISEMENT
被动机构使机械人腿部可根据管径快速调整长度,以适应管径变化;主动机构实时控制机械人脚部与管壁的压力,保证机械人脚部与管壁可靠接触,使机械人具有足够前进动力。
机械人采用两头两尾前后对称的模块化结构,具有23个自由度,配备位置、力等多种类型感应器。机械人的“智慧大脑”利用全身感应器信息计算管道机械人的姿态、位置,并给出运动策略,在保障管道安全的前提下,调整全身各关节位置、速度、力的输出,使机械人平稳地在太空站管道内运动。
试验时,太空站在太空站内搭建了包含不同直径的直管、弯管、锥管的模拟管道,在模拟管道内开展了机械人运动能力试验、收缩状态下管道机械人拉出试验,和机械人状态微调后拉出试验。
过程中,机械人平稳可靠地通过多种直径的直管、弯管、锥管,验证了适应多种复杂管道的机械人自主运动技术;断电后,机械人可轻松地从复杂管道内拉出,验证了机械人被动柔顺机构的安全性。
本次试验,证明了机械人在太空站管道复杂环境下的自主适应运动能力和安全性,为未来在太空站管道的实际应用积累宝贵经验。
字


ADVERTISEMENT
热门新闻





百格视频






ADVERTISEMENT





















