


(费城16日综合电)想象一个能穿梭于地震废墟中进行搜救,或在你血管里游走送药的柔软机器人——这不再是科幻情节!由美国宾州州立大学领衔的国际团队,正通过柔性电子和磁控技术将这一幻想变为现实。
微缩版软体机器人
与传统刚性机器人不同,这种软体机器人采用仿生材料,能如活体组织般柔韧灵活,轻松穿过狭小空间,比如坍塌建筑的缝隙,甚至是人体内部的复杂结构。研究负责人、工程科学与力学系副教授程寰宇(译音)指出:“最大挑战是让它们变‘聪明’。过去软体机器人依赖外部操控,只能单向接收指令,而我们给它装上了‘感官’。”
ADVERTISEMENT
团队的目标,是让机器人能自主感知环境并作出反应,大大减少人为干预。
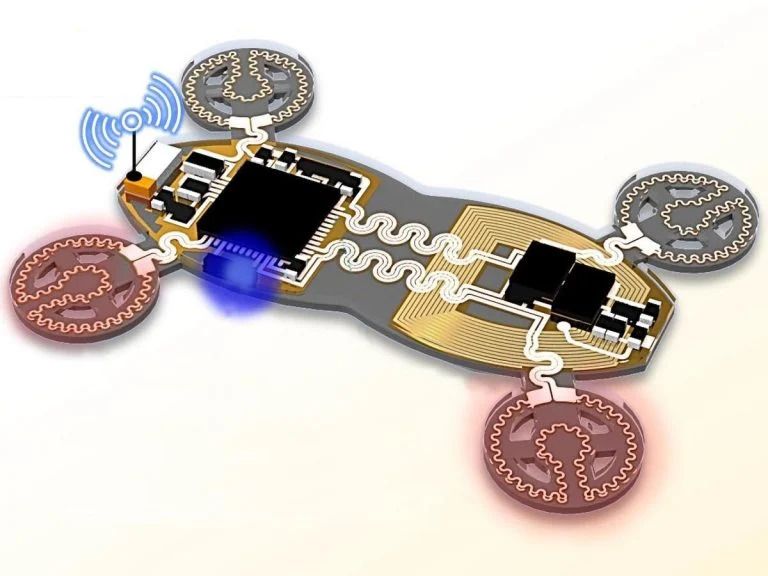
关键突破在于将柔性电子元件巧妙植入机器人结构中。
“我们的目标是设计一套软体机器人与柔性电子无缝协作的系统,”程寰宇说,“传统电子元件刚性强,难以实现集成。为此,我们采用分布式设计,把电子元件分散排布,既不妨碍机器人柔韧性,又能保证稳定性能。”
靠硬磁材料灵活扭动
团队发布的实验视频中,最终的成果令人惊艳:机器人凭借嵌入其中的硬磁材料,得以对外部磁场做出精准反应。研究人员通过调整外部磁场的强度和方向,控制机器人的各种动作。这些柔性机器人在无需电池或电线的情况下,不仅能灵活扭动、爬行,甚至能滚成球前进。
另一挑战是阻止不必要的电磁干扰,比如来自其他电子设备或无线信号等的外部来源。
“磁场虽然用来控制运动,但它也会干扰电子信号。”程寰宇指出,为此,他们团队特别优化了抗干扰的电子布局,确保传感器即使在强磁场下也能稳定运行。
解决这些关键技术后,这种机器人现在可以通过磁力远程操控,甚至靠内置的集成传感器自主识别环境而采取行动。比如,在废墟中进行搜救时检测体温或障碍物,在医疗应用中根据体内pH值、压力变化精准送药或采样。
未来研发可“吞”机器人
研究团队的下一目标,是研发一款能吞服的机器人胶囊。
“想象一下,像药丸一样的微型机器人,可以通过口服进入人体,在肠道中自主移动,检测疾病,甚至精准释放药物。” 该项目合作者、韩国高丽大学教授黄锡源(译音)说。
这将为传统活检等侵入式检测提供替代方案,实现实时、微创、个性化诊疗。
程寰宇也展望了未来可能的突破:“如果我们能把机器人做得更小,它甚至能注入血管内,用于心血管病治疗或靶向药物传送,真正为微创医疗开辟全新未来。”
目前这款柔性机器人还没正式命名,不过程寰宇笑着说,“或许该让公众来帮起个好名?“


ADVERTISEMENT
热门新闻





百格视频





ADVERTISEMENT





















